Data-Driven Depot: How “Physical AI” Is Scaling Enterprise E-Mobility Solutions
Electric fleets are growing faster than the infrastructure supporting them. Depots that once handled a dozen diesel vehicles now manage mixed fleets of vans, trucks, and pool cars, each with different charging requirements, route priorities, and dwell times, all competing for constrained grid capacity. Operational intelligence has become the binding constraint on fleet electrification. This is where “physical AI” enters: applying real-time data, sensor networks, and machine learning directly to the physical environment of the depot. For enterprises serious about scaling e-mobility solutions reliably and profitably, the depot is where that work has to happen first.
Enterprise e-mobility solutions don’t fail because operators bought the wrong electric vans. They fail because the depot still runs like a diesel yard: separate spreadsheets, separate charger dashboards, separate route plans, and one tired operations manager trying to make the whole thing behave before the morning dispatch.
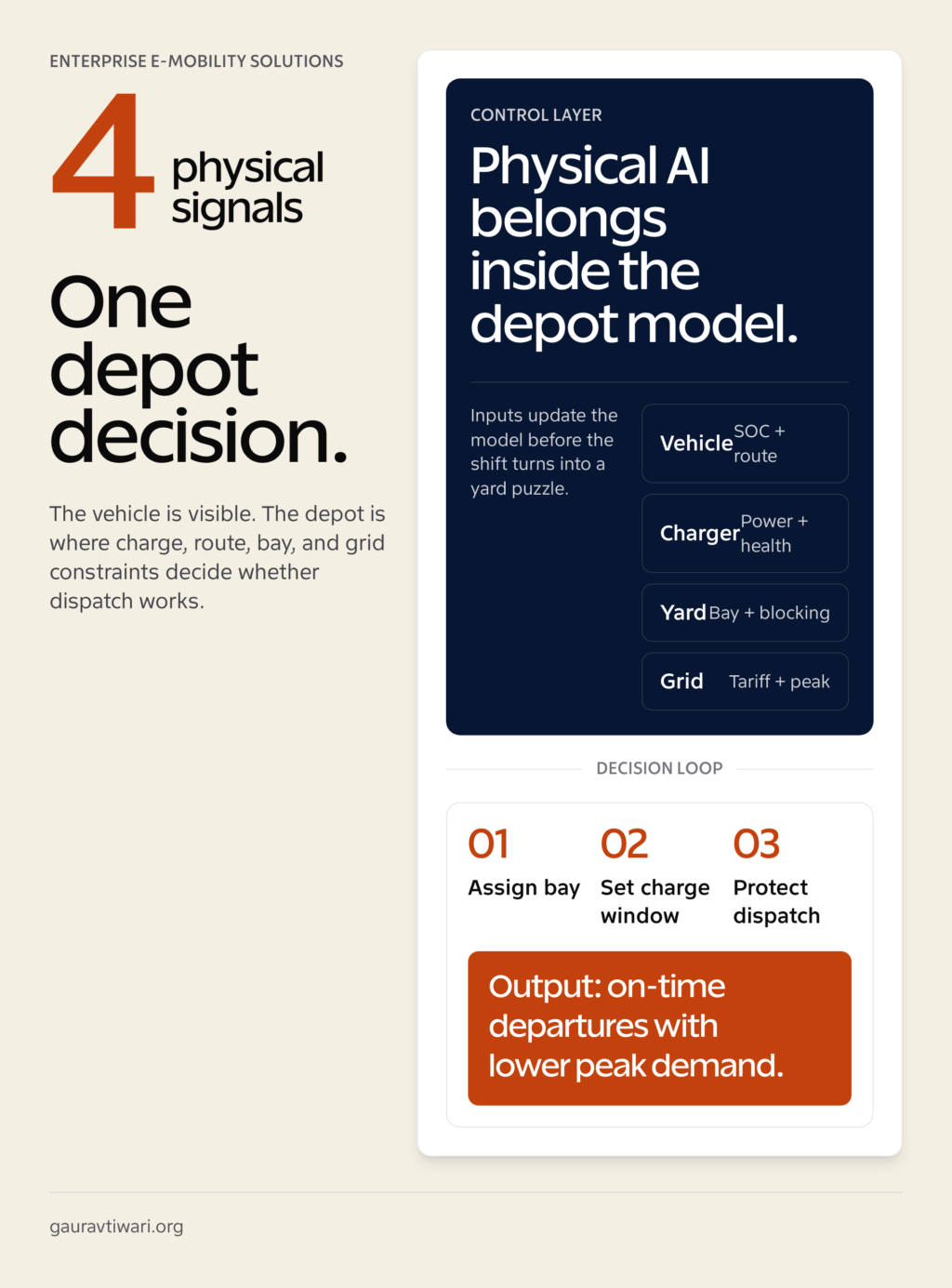
That works when you have five vehicles and one charger. It breaks when you have 60 vehicles, mixed route priorities, AC and DC chargers, demand charges, driver shifts, and a grid connection that was never designed for everyone plugging in at 6 p.m. The vehicle is the visible part of fleet electrification. The depot is where the money, reliability, and headaches live.
The newer answer is “physical AI,” which is just a practical way of saying this: use live data from the physical depot to make better operational decisions. Not a chatbot. Not a dashboard with a fancy icon. A system that understands vehicles, chargers, bays, routes, dwell time, and grid limits at the same time.
That distinction matters. According to IEA’s Global EV Outlook 2025, global electric car sales crossed 17 million in 2024, and electric truck sales grew by nearly 80% that year. Adoption is no longer the hard question for many enterprises. Running electric fleets without adding operational chaos is.
Why Depots Are the Real Frontier for E-Mobility Solutions
Most electrification strategies focus on vehicles and chargers. The harder problem, the one that determines whether a fleet actually performs, sits in depot operations.
E-mobility solutions live or die inside the depot because that’s where energy, routing, parking, maintenance, and dispatch collide. A vehicle can have enough battery on paper and still miss its route because it was parked in the wrong bay, plugged into the wrong charger, or held behind another vehicle that didn’t need priority.
Most enterprise EV plans still start with two line items: vehicles and chargers. That’s understandable. They’re expensive, visible, and easy to put into a procurement plan. But once the first pilot grows into daily operations, the real constraint shifts from hardware to coordination.
The simple pilot becomes a messy operating system
Early EV deployments are forgiving. A small pool of vehicles returns to the same few chargers, mostly overnight, with enough slack to hide bad planning. Once the fleet grows, the depot starts acting like a live operating system.
You now have vans, trucks, pool cars, and sometimes specialist vehicles sharing the same site. Some need full charge before a long route. Some only need a top-up. Some can sit overnight. Others have a short dwell window between shifts. Add multiple charger types, shared parking bays, peak electricity pricing, and a limited grid connection, and the scheduling problem gets ugly fast.
This is why depot charging is becoming a policy-level issue, not just an operations issue. The UK Depot Charging Scheme, opened in March 2026, is funding 70% of chargepoint and civil costs in its first window, up to GBP 1 million across sites. Governments don’t create programs like that when the problem is “buy a few more plugs.” They do it when infrastructure, grid capacity, and commercial fleet planning have become linked.
The depot already has the data, but not the picture
The strange part is that most modern depots already collect enough signals to make better decisions. The data just sits in different systems.
Common sources include:
- Telematics data such as state of charge, odometer readings, fault codes, GPS location, and vehicle availability.
- Charge management data such as session start time, power draw, delivered energy, interruption events, and connector status.
- Yard and access data such as check-in time, bay occupancy, gate events, driver handover, and vehicle movement.
- Business data such as route priority, delivery time windows, customer commitments, labor schedules, and energy tariffs.
None of these systems is useless. The problem is that each one sees only part of the truth. The charger platform knows a connector is available. The route planner knows a vehicle leaves at 06:00. The telematics system knows the battery is at 34%. The yard team knows the vehicle is blocked behind two others.
If those facts don’t meet in one model, the dispatcher still has to reconcile reality by hand.
Physical AI turns depot data into operational decisions
Physical AI for EV fleets means connecting the digital model to the real depot. It watches the physical state of vehicles, chargers, bays, and grid capacity, then recommends or triggers the next best action based on current constraints.
The important word is physical. A generic AI layer sitting on top of incomplete dashboards won’t fix depot operations. It may summarize bad data faster, which is not the same thing as improving decisions. Useful AI needs structured inputs from the depot itself.
What physical AI needs before it can help
A working system needs four layers.
First, it needs asset identity. Every vehicle, charger, connector, parking bay, meter, and relevant gate event must have a consistent ID across systems. If the same truck appears under three names, optimization starts with confusion.
Second, it needs live status. State of charge, charger availability, fault state, bay occupancy, route assignment, and departure deadline need to update close to real time. Batch exports are fine for reports. They’re weak for dispatch.
Third, it needs constraints. Grid import limit, demand charge thresholds, tariff windows, minimum required charge, route distance, maintenance status, and driver shift timing must be readable by the planning layer.
Fourth, it needs decision rights. If the system can only observe, it becomes another dashboard. To matter, it must be able to recommend charger assignment, adjust charging windows, flag conflicts, or push instructions into the tools operators already use.
That’s where teams building custom e-mobility solutions usually earn their keep. The difficult work isn’t a machine-learning model in isolation. It’s the data model, integrations, and decision workflow around the physical depot.
Managed charging is the first practical win
Managed EV charging is the easiest place to see the value because the math is immediate. The US Department of Energy describes managed EV charging as controlling when and how vehicles charge without compromising fleet needs. It also names the obvious risks of unmanaged charging: higher peak pricing, demand charges, infrastructure upgrades, and grid capacity limits.
That lines up with what happens inside a depot. If every vehicle starts charging the moment it plugs in, the site can hit a peak that is expensive, unnecessary, or technically impossible. If charging is scheduled against departure priority and tariff windows, the same vehicles can leave ready with a lower peak load.
For enterprise e-mobility solutions, this is not a nice optimization layer. It’s basic operational hygiene.
The smart depot has three jobs
A smart depot doesn’t need to be theatrical. It needs to do three boring jobs well: know the current state, choose the next action, and learn from what happened. If it can do that across charging, parking, and maintenance, fleet electrification becomes a system instead of a daily scramble.
Job 1: Match vehicles to chargers and bays
Charging and parking should be planned together. If they aren’t, the depot ends up with charged vehicles trapped behind uncharged vehicles, high-priority trucks on low-power chargers, and low-priority vehicles taking the best bays overnight.
A useful system assigns vehicles based on:
- Current state of charge.
- Required departure time.
- Route energy requirement.
- Charger power level and connector compatibility.
- Bay access and blocking risk.
- Grid headroom and tariff window.
The output is simple: put this vehicle in this bay, on this charger, for this window. The hard part is making that recommendation update when a route changes, a driver arrives late, or a charger faults mid-session.
Job 2: Plan routes, shifts, and charging as one problem
Most fleet teams still plan routing, driver shifts, and charging in separate tools. That creates conflicts that look small in software and expensive in real life.
Here is the typical pattern:
| Planning area | What it optimizes | What breaks when it is isolated |
|---|---|---|
| Route planning | Delivery sequence and mileage | Vehicle may not have enough dwell time to charge |
| Shift scheduling | Driver availability and labor coverage | Driver may arrive before the vehicle is ready |
| Charge management | Energy cost and charger usage | Charging may ignore route priority |
| Yard management | Bay occupancy and movement | Charged vehicles may get physically blocked |
AI-driven scheduling becomes useful when it treats those as one planning problem. The goal isn’t “charge everything.” The goal is on-time departure at the lowest practical energy cost, without creating a yard puzzle at 5 a.m.
This is also where related systems matter. If you already use cloud and IoT logistics platforms, depot intelligence should connect to that stack instead of becoming a separate tool nobody trusts. The same principle applies to broader AI in transportation and logistics: the model is only useful when it touches the operational workflow.
Job 3: Catch failures before the morning shift does
The most expensive charger fault is the one discovered when a vehicle is supposed to leave. By then, the route, driver, customer promise, and backup vehicle plan are all under pressure.
Physical AI helps by watching patterns humans miss:
- A connector that fails more often after rain.
- A charger that delivers less power than expected under load.
- A vehicle battery that needs longer charging than its history suggests.
- A route that repeatedly returns with lower reserve than planned.
- A bay that causes blocking delays during certain shift overlaps.
This isn’t magic. It’s anomaly detection and workflow discipline. But in a fleet depot, boring early warnings are worth more than impressive after-action reports.
Why off-the-shelf platforms hit a wall
Generic fleet and charging platforms can handle straightforward deployments. They usually cover charger visibility, session logs, basic scheduling, and user access. That may be enough for a small depot with predictable routes and plenty of grid capacity.
The trouble starts when the operation has constraints the platform wasn’t built around.
The common breaking points
Off-the-shelf systems tend to struggle when the depot has:
- Mixed vehicle classes with different energy needs and turnaround windows.
- Shared bays used by multiple shifts or business units.
- Grid constraints that require site-specific load management.
- Integration needs across warehouse, dispatch, ERP, facility, and charge management systems.
- Vehicle-to-grid or battery storage logic tied to local tariffs and utility rules.
- Multi-site benchmarking across depots with different layouts and grid limits.
At that point, the question is not whether the platform has an AI feature. The question is whether the underlying model reflects how the depot actually works.
This is similar to the modern e-commerce warehouse problem. Automation gets attention, but the value comes from connecting inventory, movement, labor, and customer commitments into one operational truth. EV depots are moving in the same direction.
Custom work should solve integration, not vanity
Custom e-mobility solutions make sense when the operation is complex enough that the data model becomes a competitive advantage. That doesn’t mean building everything from scratch. It means designing the integration layer, rules, and optimization logic around the actual depot.
The best custom work usually focuses on:
- A single operational data model for vehicles, chargers, bays, routes, tariffs, and grid limits.
- Clean integrations with fleet management, charger management, ERP, warehouse, and facility systems.
- Site-specific rules that operators can understand and override.
- Dashboards that show decisions, not just charts.
- Multi-depot reporting that compares like with like.
If the project starts with “let’s add AI” before the data model exists, I’d be skeptical. If it starts with “let’s define the depot reality accurately,” the AI layer has something useful to work with.
Scaling from one smart depot to many
One optimized depot is a proof point. A network of optimized depots is where enterprise e-mobility solutions start to pay back properly. The architecture has to separate what is shared from what is site-specific.
Shared logic can cover charging priorities, route-energy estimation, fault detection, reporting definitions, and benchmarking. Site-specific configuration should cover bay layout, grid limit, charger mix, tariff schedule, local operating rules, and dispatch patterns.
That split matters because every depot is a little weird. One site has a weak grid connection. Another has awkward parking geometry. Another has long dwell windows but poor charger reliability. Another has high-power chargers but tight labor scheduling. You don’t want a separate system for each site, but you also don’t want one generic rule set pretending every depot behaves the same way.
What to measure across depot networks
The metrics should be boring and hard to fake:
- On-time departure rate.
- Charger utilization by power class.
- Failed or interrupted charging sessions.
- Energy cost per mile or kilometer.
- Peak demand events.
- Average dwell-time efficiency.
- Vehicles leaving below required charge.
- Maintenance faults caught before dispatch.
These numbers give executives a better question to ask than “how many chargers did we install?” The better question is “which depot gets the most reliable route output from the same energy and infrastructure?”
Reports like the NACFE and Ampcontrol smart charging report are useful because they focus on real electric truck depots, including findings from more than 250 electric trucks in fleet operations. That is the level of proof operators should care about: not whether EVs work in theory, but whether the site can keep them working every day.
What I would build first
If I were helping an enterprise start this properly, I wouldn’t begin with the AI model. I’d begin with a depot truth map.
Map every vehicle, charger, bay, route, meter, tariff window, and departure deadline. Then answer five uncomfortable questions:
- Which data source owns each fact?
- How fresh does that fact need to be for operations?
- Which conflicts currently get solved manually?
- Which decisions should the system recommend, and which should it automate?
- Which metric proves the depot is getting better?
Only after that would I build the optimization layer.
That may sound less exciting than “physical AI,” but it’s the part that makes physical AI work. The depot has to become machine-readable before it can become machine-assisted.
Enterprise e-mobility solutions are moving past the vehicle-purchase phase. The next winners will be the operators who treat the depot as the control layer for fleet electrification. Get the data model right, connect the systems that already run the business, and make charging, parking, routing, and maintenance part of the same decision loop.
That’s how electric fleets stop feeling like pilots and start behaving like operations.
Frequently Asked Questions
What are e-mobility solutions for enterprise fleets?
E-mobility solutions for enterprise fleets include the software, infrastructure, integrations, and operating rules needed to run electric vehicles at scale. That usually means fleet telematics, depot charging, smart charging, route planning, maintenance workflows, energy reporting, and integration with dispatch or ERP systems.
What is physical AI in an EV depot?
Physical AI in an EV depot uses live signals from vehicles, chargers, bays, meters, sensors, and operating systems to make decisions about charging, parking, routing, and maintenance. It connects AI to the physical state of the depot instead of relying on static reports or disconnected dashboards.
Why is depot charging harder than home or public charging?
Depot charging is harder because many vehicles need energy inside the same operating window, often on a limited grid connection. Fleet operators also need to account for route priority, driver shifts, bay access, charger faults, demand charges, and departure deadlines at the same time.
When should a company invest in custom e-mobility solutions?
A company should invest in custom e-mobility solutions when off-the-shelf platforms cannot model its depot reality. Common triggers include mixed vehicle classes, multi-site operations, tight grid limits, complex route schedules, V2G or battery storage needs, and deep integration with warehouse or dispatch systems.
What should an EV fleet measure first?
An EV fleet should measure on-time departure rate first because it ties the charging system to operational performance. Charger utilization, energy cost, peak demand, failed sessions, dwell-time efficiency, and vehicles leaving below required charge are also important, but on-time departure shows whether the depot is doing its job.