Newton’s Laws of Motion
Newton’s Laws of Motion describe how forces produce changes in motion. Three short statements, published by Isaac Newton in 1687 in Philosophiae Naturalis Principia Mathematica, became the foundation of classical mechanics — the framework that built bridges, launched satellites, and explained planetary motion for over 200 years before relativity and quantum mechanics arrived to refine it.
The laws apply to every macroscopic, slow-moving object you’ll encounter in daily life. Cars, projectiles, falling apples, satellites, billiard balls, and pendulums all obey them with extraordinary precision. Only at extreme speeds (near the speed of light) or extreme scales (atoms and below) do you need newer physics. For the entire engineering world, Newton’s laws are the ground truth.
This study note covers the three laws individually, the underlying concept of inertial reference frames, momentum and impulse, applications across engineering and astronomy, the limits where Newtonian mechanics breaks down, common pitfalls, and the historical context that explains why the Principia ranks among the most influential scientific works ever written.
First Law: The Law of Inertia
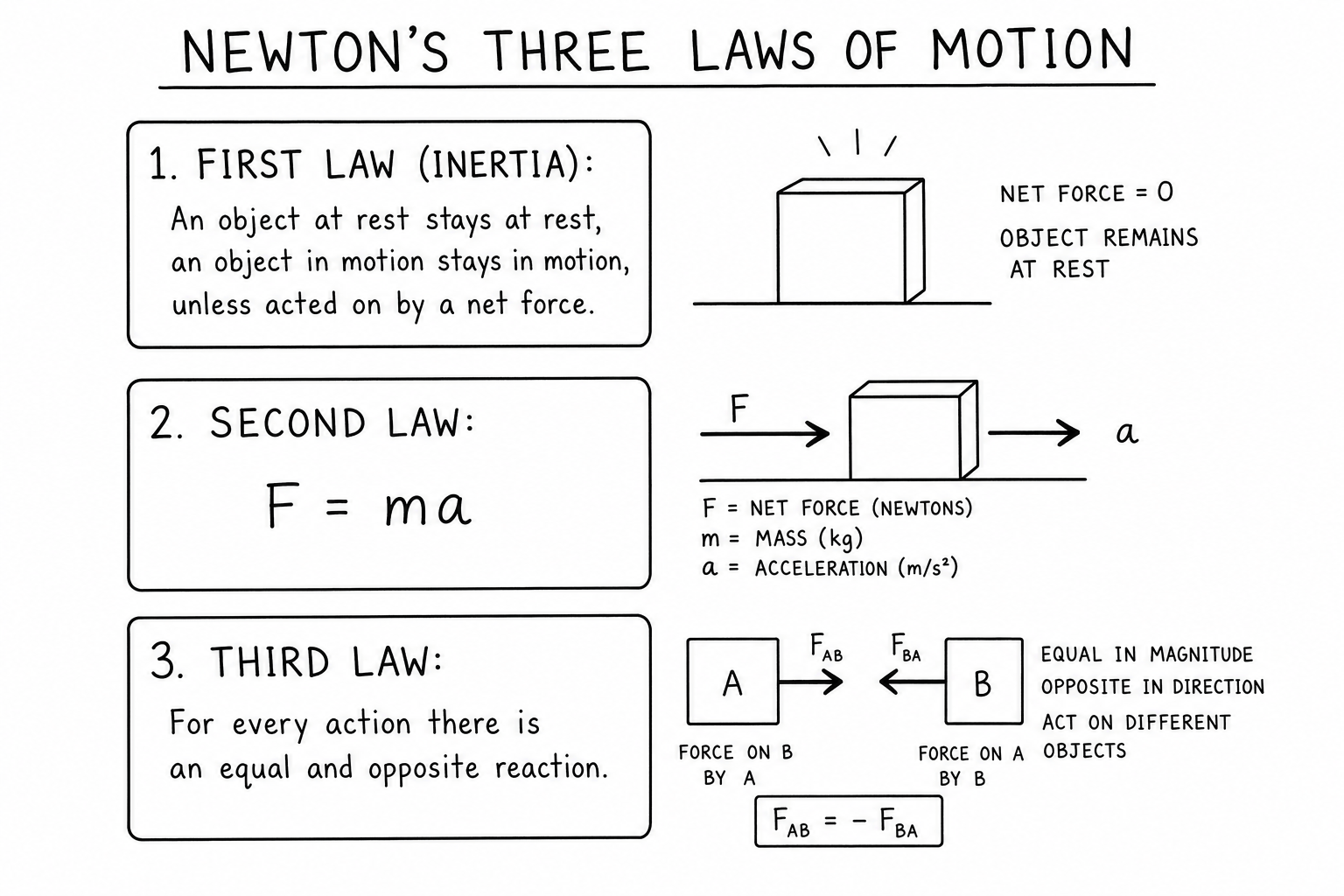
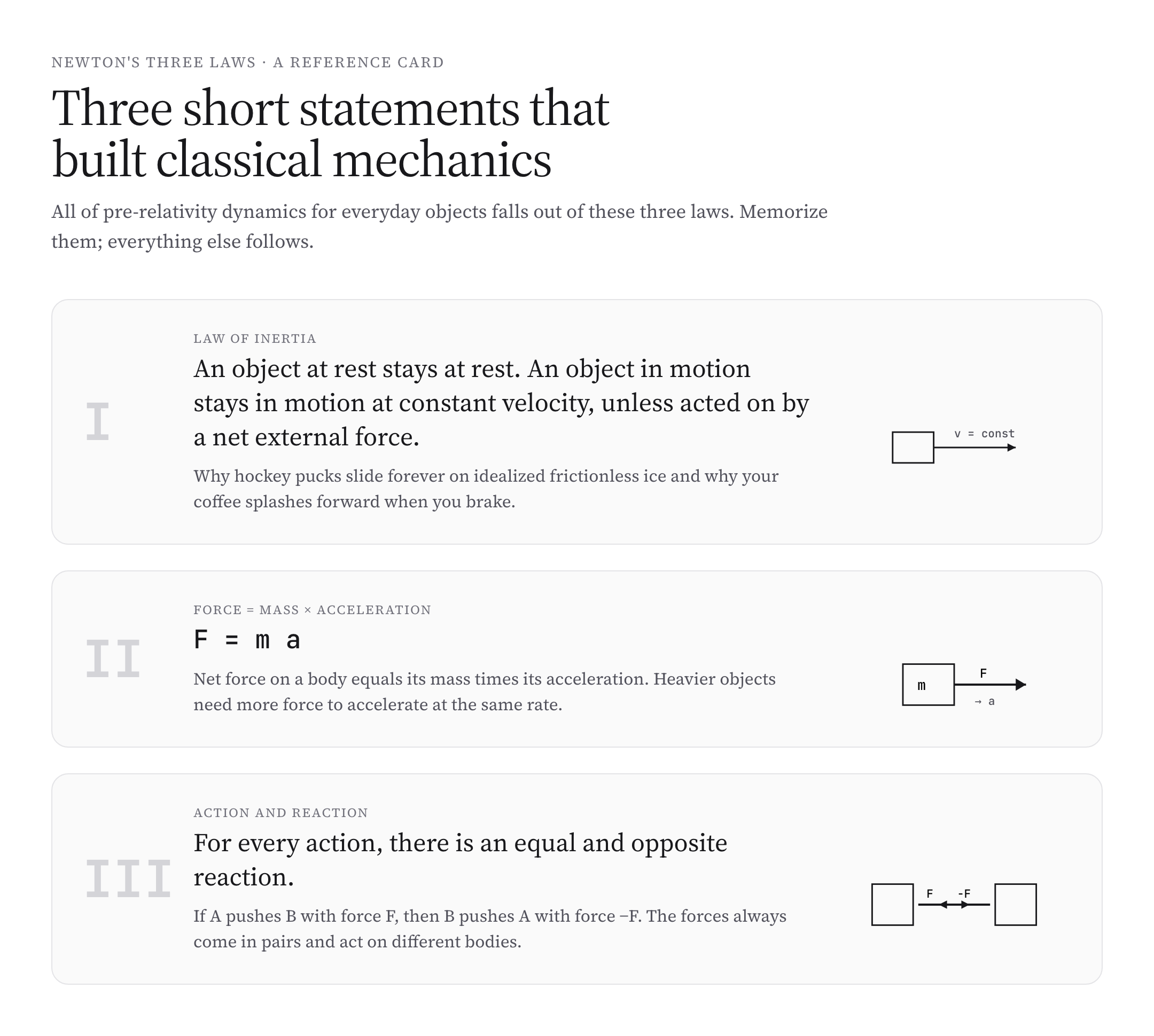
An object at rest stays at rest, and an object in motion stays in motion at constant velocity, unless acted on by a net external force.
Aristotle taught that motion required a continuous force — push a cart, the cart moves; stop pushing, it stops. Galileo and Newton revealed that this was wrong. The cart stops because friction is constantly braking it. In an idealized frictionless world, the cart would coast forever in a straight line at the same speed.
The first law also defines what we mean by “force” implicitly: a force is whatever causes a change in velocity. No force, no change. The law fails (or appears to fail) in non-inertial reference frames — like a rotating carousel — where extra “fictitious forces” (centrifugal, Coriolis) appear to act on objects. The true statement of the first law is restricted to inertial frames.
Second Law: F = ma
The acceleration of an object is directly proportional to the net force acting on it, and inversely proportional to its mass:
$$\mathbf{F}_{\text{net}} = m \mathbf{a}$$Both quantities are vectors. The acceleration is in the same direction as the net force.
This single equation lets you compute the motion of any classical system if you know the forces. Engineers use it constantly — for stress analysis (force on a beam produces deflection), automotive design (engine force produces vehicle acceleration), aerospace (thrust minus drag minus gravity gives net acceleration), and almost every dynamic problem in mechanical and civil engineering.
The mass \(m\) is the inertial mass — a measure of how much the object resists acceleration. Heavier objects need proportionally more force to achieve the same acceleration. This inertial mass turns out to equal gravitational mass to extraordinary precision (the equivalence principle), which Einstein later identified as the deep insight behind general relativity.
Third Law: Action and Reaction
For every action, there is an equal and opposite reaction. If body A exerts a force \(\mathbf{F}\) on body B, then body B exerts a force \(-\mathbf{F}\) on body A.
The two forces are always paired — same magnitude, opposite direction, acting on different bodies. The classic illustration is rocket propulsion: hot gas is expelled downward at high speed; the rocket experiences an equal upward thrust. Without the third law, propulsion in vacuum (no air to push against) would be impossible.
The third law also explains why you don’t fall through the floor: gravity pulls you down with force \(mg\); the floor pushes up on you with the same force \(mg\) (the normal force). Net force on you is zero, so you don’t accelerate. Walk on ice and the friction force pair (you push back on the ice; the ice pushes you forward) is what enables forward motion.
Inertial Reference Frames
Newton’s laws hold in inertial reference frames — frames that are not accelerating. The Earth’s surface is approximately inertial for most purposes (the rotation introduces small corrections, like the Coriolis effect that deflects winds and ocean currents).
In non-inertial frames (a braking car, a rotating merry-go-round), Newton’s laws appear to fail. Objects accelerate without obvious applied forces. To restore F = ma, physicists introduce fictitious forces — centrifugal force, Coriolis force, Euler force — that aren’t real forces but bookkeeping terms compensating for the frame’s acceleration.
This subtlety matters in geophysics (atmospheric and oceanic circulation), aerospace (spacecraft attitude control), and any rotating-frame analysis. The takeaway: Newton’s laws work, but only in the right frame. Pick your frame deliberately.
Worked Examples and the Three Laws Together
The three laws work together on every problem. Consider pushing a 10 kg crate across a floor with friction coefficient 0.3.
Forces: applied force \(F\), friction \(\mu N = 0.3 \times mg = 29.4\) N opposing motion, gravity \(mg = 98\) N downward, normal force \(N = 98\) N upward (third law pair with gravity through the floor). Net horizontal force: \(F – 29.4\) N. Net vertical force: 0.
By second law, horizontal acceleration is \(a = (F – 29.4)/10\) m/s². Apply 50 N: acceleration is \(2.06\) m/s². Apply only 20 N: net horizontal force is \(-9.4\) N — but the crate is at rest and friction can’t actually push it backward, so the static friction case adjusts and the crate doesn’t move. Real-world friction has subtleties (static vs kinetic) but the basic Newton’s-law analysis is the same.
Momentum and Impulse
Momentum is mass times velocity: \(\mathbf{p} = m\mathbf{v}\). Newton’s second law in its original form was actually about momentum: \(\mathbf{F} = d\mathbf{p}/dt\). For constant mass, this reduces to \(F = ma\). For variable-mass systems (rockets ejecting fuel), the momentum form is more general.
Impulse is force integrated over time: \(\mathbf{J} = \int \mathbf{F}\, dt = \Delta \mathbf{p}\). The impulse-momentum theorem says the change in momentum equals the integral of force over the time the force acts. This is why airbags work — they spread the deceleration over more time, lowering the peak force on the body even though the total impulse is the same.
Conservation of momentum follows directly from Newton’s third law. In an isolated system (no external forces), the total momentum is constant. Used everywhere from rocket equations to billiard ball collisions to particle physics.
Conservation Laws
Newtonian mechanics has three central conservation laws, each tied to a symmetry by Noether’s theorem:
- Conservation of momentum ↔ translational symmetry (laws of physics same everywhere in space).
- Conservation of energy ↔ time symmetry (laws of physics same at all times).
- Conservation of angular momentum ↔ rotational symmetry (laws of physics same in all directions).
Conservation laws turn complicated dynamical problems into algebraic ones. A car crash analyzed by tracking forces over time is intractable; analyzed via momentum and energy conservation, it’s a one-line calculation. This is why physicists love conservation laws — they bypass the dynamics entirely when applicable.
Applications: Engineering and Astronomy
- Civil engineering: structural analysis treats every beam, column, and joint as a Newtonian system in equilibrium. Bridges, buildings, and dams are all designed with Newton’s laws.
- Mechanical engineering: engines, gears, suspensions, and robotics all obey Newtonian dynamics. Modern multi-body simulation packages (ADAMS, MSC, SimMechanics) integrate Newton’s equations forward in time across thousands of components.
- Aerospace: aircraft, rockets, and satellites follow Newtonian trajectories. Orbital mechanics — Kepler’s laws derived from Newton’s gravity and second law — governs everything from GPS satellites to interplanetary missions.
- Civil and traffic engineering: braking distances, crash safety, and vehicle design all use F = ma and momentum analysis.
- Sports and biomechanics: jumping, throwing, swinging, and kicking are Newtonian problems involving force, mass, and acceleration of body segments.
- Astronomy: Newton’s law of universal gravitation, combined with the second law, predicts planetary orbits to extreme precision. Discovered Neptune by predicting its perturbations on Uranus before anyone observed it visually.
Projectile Motion: F = ma in Action
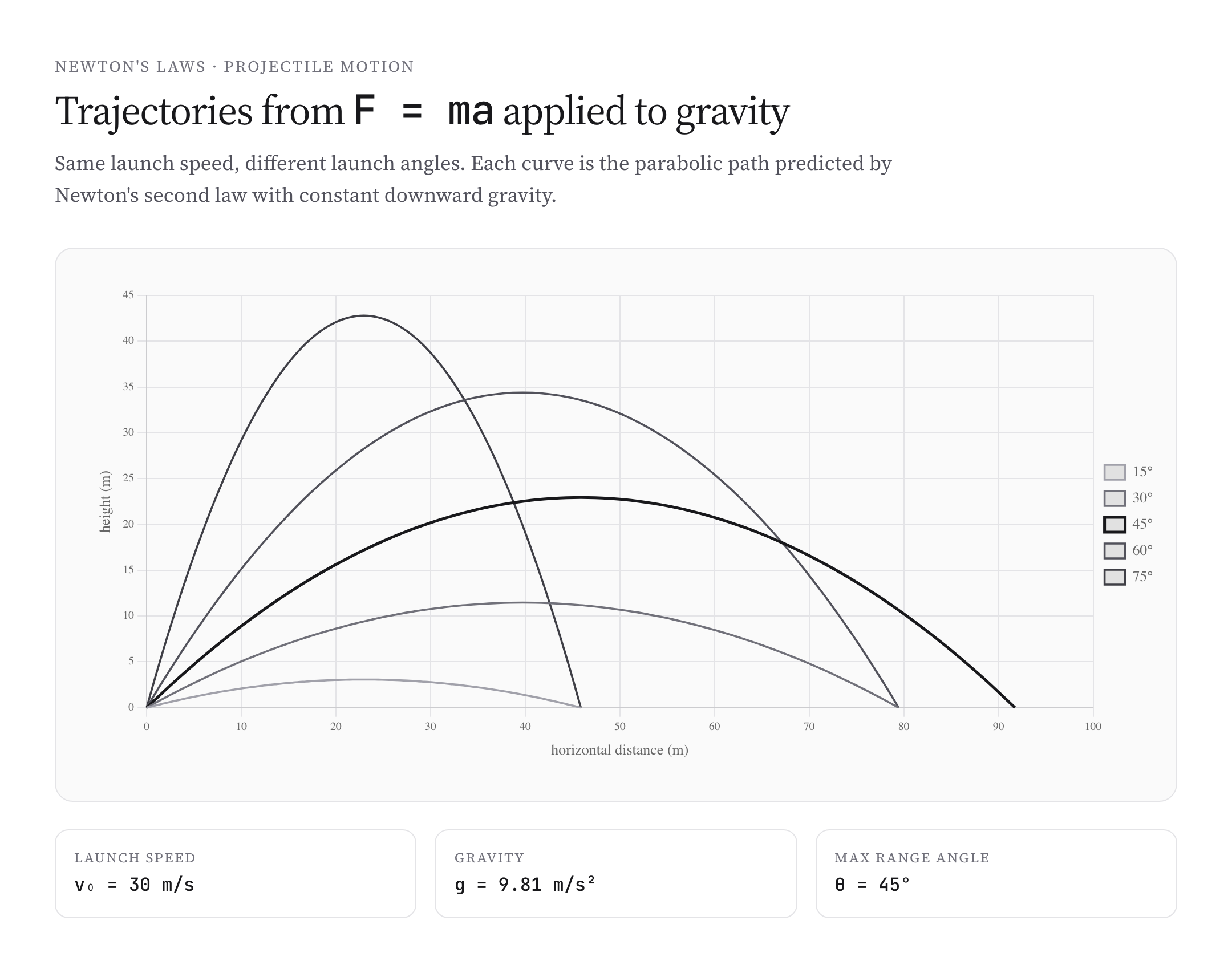
A projectile is any object flying through the air under gravity alone (ignoring air resistance). Horizontal acceleration is zero (no horizontal force). Vertical acceleration is \(-g\) (constant downward gravity). Integrating gives the parametric equations:
$$x(t) = v_0 \cos\theta \cdot t, \quad y(t) = v_0 \sin\theta \cdot t – \frac{1}{2}g t^2$$Eliminating \(t\) gives a parabolic trajectory. The maximum range happens at \(\theta = 45°\) (for level ground). Time of flight, peak height, and landing distance all follow from these equations.
This is one of the cleanest physics problems for demonstrating Newton’s second law. Real-world projectiles add air resistance, which makes the trajectory non-parabolic and shifts the optimal launch angle below 45°. Ballistics, sports physics, and rocket trajectory analysis all build on this foundation.
Where Newton’s Laws Break Down
Newton’s laws are extraordinarily accurate but not universal:
- High speeds (near the speed of light): special relativity replaces \(F = ma\) with relativistic equations. Mass effectively increases at high speed; time and distance dilate.
- Strong gravity: general relativity replaces Newtonian gravity with curved spacetime. GPS satellites need both special and general relativistic corrections to be accurate.
- Atomic and subatomic scales: quantum mechanics replaces deterministic Newtonian motion with probabilistic wavefunctions. Position and momentum can’t both be known precisely (Heisenberg uncertainty).
- Very large numbers of particles: tracking each particle’s Newtonian motion is infeasible; statistical mechanics handles bulk behavior instead.
For everyday human-scale phenomena, Newton’s laws are accurate to many decimal places. The relativistic and quantum corrections only become measurable in extreme regimes. For 99% of engineering, Newtonian mechanics is the right tool.
Common Mistakes With Newton’s Laws
- Forgetting that net force matters, not individual forces. A book at rest on a table has gravity pulling down and normal force pushing up — both are real forces, but the net is zero, so no acceleration. Always sum forces vectorially.
- Mixing up action-reaction pairs. The third-law pair acts on different bodies, not the same body. If you push the wall, the wall pushes you. The pairs aren’t “you push down, the floor pushes you up” (that’s gravity-and-normal, not third-law).
- Using non-inertial frames carelessly. A car braking is a non-inertial frame. Coffee in the cupholder appears to accelerate forward without force; the apparent force is fictitious. Either switch to an inertial frame or include fictitious forces explicitly.
- Confusing mass with weight. Mass is the same everywhere. Weight is mass times local gravitational acceleration. On the Moon, your mass is unchanged but your weight is one-sixth.
- Ignoring friction. Real-world problems have friction. Idealized “frictionless” calculations need to be checked against whether friction is small enough to ignore.
A Brief History of Newton’s Laws
Galileo Galilei laid the groundwork in the early 1600s, identifying the law of inertia and disproving Aristotelian motion through inclined-plane experiments. Christiaan Huygens, Robert Hooke, and others contributed pieces.
Isaac Newton synthesized the three laws (and universal gravitation) in his 1687 Principia. The book reorganized centuries of disparate observations into a unified mathematical framework that explained terrestrial mechanics, planetary motion, tides, and the precession of equinoxes — all from a few short laws and the inverse-square law of gravity.
The Principia is widely considered the most important scientific work ever written. It established the model of physics as mathematical, predictive, and unifying — a model still in use today. Einstein’s relativity (1905, 1915) and quantum mechanics (1925-26) refined Newton’s framework but didn’t overturn it for everyday phenomena. For all practical engineering, Newton’s three laws remain the working foundation, three centuries later.
Newton’s Universal Law of Gravitation (Companion)
Often paired with the three laws of motion: every two masses attract each other with force:
$$F = G \frac{m_1 m_2}{r^2}$$where \(G \approx 6.674 \times 10^{-11}\) N·m²/kg² is the gravitational constant. The force acts along the line connecting the two centers and is proportional to the product of masses divided by the square of distance.
Combined with the second law, this predicts all of planetary motion. Orbits are conic sections (ellipses, parabolas, hyperbolas). Kepler’s three empirical laws of planetary motion fall out as special cases. Newton was the first to unify “celestial” mechanics (planets) with “terrestrial” mechanics (apples) under a single law.
Newton’s Laws in Rotating Frames
The Earth’s rotation makes its surface a non-inertial reference frame. To apply Newton’s laws there, you have to add fictitious forces — the centrifugal force pulling outward and the Coriolis force deflecting moving objects. Both are bookkeeping terms that compensate for the frame’s rotation, not real interactions.
The Coriolis force is why hurricanes rotate (counterclockwise in the Northern Hemisphere, clockwise in the Southern), why long-range artillery has to correct for Earth’s spin, and why Foucault pendulums slowly rotate their plane of oscillation. The centrifugal force is why you feel pushed outward in a turning car. Both feel like real forces because they produce real apparent accelerations — but switching to an inertial frame (an observer outside the rotating system) makes them disappear.
Free Body Diagrams: The Standard Tool
The free body diagram (FBD) is the everyday workhorse for applying Newton’s laws. Isolate one body, draw all the external forces acting on it as labeled arrows, and apply F = ma component by component. Every classical mechanics problem starts with a clean FBD.
Common forces to include: gravity (always pointing down with magnitude mg), normal force (perpendicular to contact surface), friction (parallel to surface, opposing motion), tension (along ropes and cables), applied forces (whatever’s pushing or pulling). Decompose into x and y components, sum each direction, set equal to ma_x and ma_y. The system of equations gives you accelerations and unknown forces.
FAQs
What are Newton’s three laws of motion?
First law (inertia): an object stays at rest or in uniform motion unless acted on by a net force. Second law (F = ma): net force equals mass times acceleration. Third law (action-reaction): every force has an equal and opposite reaction force on a different body. Together they form the foundation of classical mechanics.
What does F = ma actually mean?
The net force on an object equals its mass times its acceleration, both as vectors. Heavier objects need more force for the same acceleration. The direction of acceleration matches the direction of net force. F = ma lets you compute the motion of any classical system from the forces acting on it.
Why doesn’t the Earth move when I jump?
It does, but only by a tiny amount. Newton’s third law: when you push down on the Earth to jump, the Earth pushes up on you with equal force. Both you and Earth accelerate, but Earth’s mass is so vast (5.97 × 10²⁴ kg) compared to yours that its acceleration is negligible — about 10⁻²³ m/s².
What is an inertial reference frame?
A frame of reference that isn’t accelerating. Newton’s laws hold exactly in inertial frames. A frame moving at constant velocity is inertial. A rotating, braking, or accelerating frame is non-inertial and requires fictitious forces (centrifugal, Coriolis) to make Newton’s laws appear to work.
How are Newton’s laws used in real engineering?
Almost everywhere. Civil engineering (bridges, buildings), mechanical engineering (engines, robotics), aerospace (rockets, aircraft), automotive (vehicle dynamics, crash safety), and sports biomechanics all rely on Newton’s laws. Modern simulation software integrates Newton’s equations forward in time across complex multi-body systems.
When do Newton’s laws break down?
At speeds approaching the speed of light (special relativity takes over), in strong gravitational fields (general relativity), and at atomic and subatomic scales (quantum mechanics). For everyday human-scale phenomena, Newtonian mechanics is accurate to many decimal places.
What is the difference between mass and weight?
Mass is the amount of matter in an object — invariant across locations. Weight is the gravitational force on the object — depends on local gravity. On Earth, weight ≈ mass × 9.81 m/s². On the Moon, the same mass weighs about one-sixth as much because Moon’s gravity is weaker.
What’s the connection between Newton’s laws and momentum?
Momentum p = mv. Newton’s second law in its original form is F = dp/dt. For constant mass, this reduces to F = ma. Conservation of momentum (in isolated systems, total momentum is constant) follows from Newton’s third law and is one of the most useful tools in physics.
How does Newton’s third law explain rocket propulsion?
A rocket expels exhaust gas downward at high speed. By the third law, the rocket experiences an equal-and-opposite force upward — thrust. This works in vacuum because the rocket and exhaust are paired by mutual force, not by pushing against external air. Conservation of momentum gives the rocket equation that designers use for fuel calculations.
What is the equivalence principle?
The observation that inertial mass (in F = ma) equals gravitational mass (in F = Gm₁m₂/r²) to extraordinary precision. Einstein elevated this to a postulate in general relativity, leading to the deep insight that gravity and acceleration are locally indistinguishable — the foundation of the curved-spacetime view of gravity.
Did Newton invent calculus to write the Principia?
Yes — at least in part. Newton developed the techniques of fluxions (his version of calculus) in the 1660s and used them to derive results for the Principia, though he often presented the geometric arguments rather than the calculus reasoning. Leibniz independently developed his own calculus around the same time, leading to the famous priority dispute.
Why is the Principia considered so important?
It was the first systematic mathematical framework that unified terrestrial and celestial mechanics under a small set of laws. It explained planetary motion, tides, projectiles, pendulums, and the precession of equinoxes — all from three laws and universal gravitation. It established the model of physics as predictive, mathematical, and unifying — a model still in use today.
What is the Coriolis force?
A fictitious force that appears in rotating reference frames. It deflects moving objects perpendicular to their velocity — to the right in the Northern Hemisphere, left in the Southern. Responsible for hurricane rotation patterns, weather circulation, ballistics corrections, and the apparent rotation of a Foucault pendulum’s plane.